Najpogostejši robotski bariatrično postopki: pregled in tehnični vidiki
Povzetek
Od svoje pojavi v letu 1997, ko je Dr.. Cadiere in Himpens naredil prvo robotsko holecistektomijo v Bruslju, ne dolgo po prvem holecistektomijo, so izvedli prvo robotsko bariatrično postopek. Menijo, da so najbolj pomembne prispevke robotsko podprto kirurgija odraža v njegovo sposobnost, da podaljša prednosti minimalno invazivne kirurgije, da postopkov ne rutinsko, opravljenih z uporabo minimalne tehnike za dostop. Opisujemo 3 najpogostejše bariatrično postopke, ki jih robot storiti. Zdi se, da boljši nadzor velikosti stome, izogibanje stroškov Spenjač, odprava možnosti za žrela in požiralnika travme, in morebitno zmanjšanje okužbe rane Glavne prednosti robotskega sistema, ki se uporablja za želodčni obvod. Medtem ko je v rokav želodca in nastavljiv želodca vojaškem sodelovanju, je njegova uporabnost bolj vprašljiva, kar daje večjo prednost med operacijo na bolnike z zelo velikimi ITM ali revisional primerih.
Ključne besede
Bariatric kirurgija Robotska kirurgija v želodcu, ki jih podaja rokav želodca želodca pasu Ozadje
od svoje pojavi v letu 1997, ko Drs. Cadiere in Himpens naredil prvo robotsko holecistektomijo v Bruslju [1] da Vinci ™ robotsko Kirurški sistem iz Intuitive Surgical, Inc., Sunny Vale, Kalifornija (sl. 1) je začel revolucijo na področju kirurgije. In seveda, bariatrična kirurgija ne bi bil izključen iz te revolucije. Ne dolgo po prvem holecistektomijo, dr Cadiere in Himpens opravil tudi prvo robotsko bariatrično postopek. To je bil robotsko podprto nastavljiv želodca banding, storiti, da kažejo izvedljivost platforme robotiko [2]. Od takrat so bili vsi postopki razvil v robotsko pristop kot možnost standardni laparoskopijo: nastavljivo želodca pasovi, rokav želodca, želodčni obvod, biliopancreatic preusmeritve z dvanajstnika stikalom in revisional bariatričnih postopkov. Vendar pa trenutne indikacije za uporabo robotsko tehniko v bariatrične kirurgije ostajajo nejasne. Fig. 1 Robotski Kirurški sistem iz Intuitive Surgical, Inc., Sunny Vale, Kalifornija
Z digitalizacijo in robotizacijo v laparoskopskih postopkov Da Vinci ™, je izbira med klasičnim laparoskopsko in robotsko laparoskopijo je zdaj kontroverzna tema, ki se nanaša na paciente in kirurgi podobni.
do danes je robotsko tehniko poročali, da je vsaj tako varna in učinkovita kot konvencionalni pristop za več postopkov, vključno s histerektomijo, atrijsko ablacijo, holecistektomijo, nefroktomijo, rectoplexy, fundoplication in prostatektomijo [3-9]. Vendar posebne koristi tako pacientom in kirurg še niso dobro opredeljena v večini primerov.
Menijo, da so najbolj pomembne prispevke robotsko podprto kirurgija odraža v njegovo sposobnost, da podaljša prednosti minimalno invazivne kirurgije s postopki ni rutinsko izvajajo z uporabo minimalne tehnike dostopa (tj skupno esophagectomies, koronarnih arterij cepljenje in radikalne prostatectomies). In zaradi svojih lastnosti lahko v končni fazi poveča število zdravnikov, ki so sposobni zagotoviti prednosti minimalno operacijo dostop do svojih bolnikih brez povečanega tveganja zapletov, povezanih z začetnimi učnih krivulj.
Dodatne prednosti z uporabo minimalno nudijo invazivne kirurške tehnike, skupaj z željo, da ohranijo naravne ergonomijo in vizualne prednosti odprto operacijo, so pogon razvoj in napredovanje operacijo-robot pomoči, ki lahko omogočijo kirurgi premagati veliko težav z laparoskopijo kirurgije: izguba globine dojemanja, izguba naravnih strani očesne koordinacije, izgubo intuitivno gibanje in izgubo spretnosti. je zaznavanje
Globina obnovljena s stereo vizualizacijo s pomočjo dveh kanalov endoskopa z ki pošilja tako za levo in desno oko slike nazaj na kirurga. Uskladitev ročnih gibov kirurga za kirurške orodja konice je tako prostorsko in vizualno. Za dosego prostorsko poravnavo, sistemske programske opreme usklajuje gibanje orodij z okvirjem kamere referenco. Da bi dosegli vidne poravnavo, sistem projicira podobo kirurške mestu na vrhu rokah kirurga. Vezana skupaj, prostorsko in vizualno postavitev naredi kirurg občutek, kot da so njegove roke notranjosti bolnikovega telesa [10].
Napredek in razvoj teh lastnosti robotiki bo na koncu vsem bariatrično kirurgi z možnostjo minimalno invazivni pristop.
Nastavljiv želodca povezovanje
Glede njegove uporabe na nastavljivo želodca vojaškem sodelovanju, je več publikacij pokazale malo koristi uporabe robota za ta postopek [11-13]. Največji serija poročalo robotske nastavljivo želodčne pasovi (RAGB) vključenih 287 bolnikov, in so bili v primerjavi s 120 primeri standardne laparoskopijo (LABG). Rezultati so bili podobni med skupinami, z izjemo krajših časov operativnih za 14 minut v RAGB, če je bolnik ITM nad 50 kg /m
2 [14]. Ti podatki kažejo, da z uporabo robota za LAGB ne spreminja invazivnosti za bolnika, ni jasnih koristi v smislu zmanjšanih neželenih učinkov. To je lahko posledica '' strop smislu '', kjer so neželeni učinki običajne LAGB že minimalen, tako da zelo malo prostora za izboljšave.
Uporabnost robotike za tako enostavno operacijo, kot smo videli, je glede na to, razprave. Morda bomo našli svojo najbolj koristen uporaba na revisional postopkih medvretenčne pasov in z njim povezano hiatal kile ali pri bolnikih z ITM nad 50 kg /m 2 sta bila robot je izkazalo, da kratek operativnem času [13].
V primerih revizij medvretenčne pasovih, povezanih z hiatal kile ponavadi ti bolniki so pretvorjene v druge postopke, kot so želodčni bypass ali rokav želodca, če ne bi bilo hudo refluks iz njihovega predhodnega nastavljivim trakom. Vendar pa je podskupina bolnikov ostaja, ki želijo obdržati svoj band. V teh bolnikih se lahko njihova hiatusna kila lahko robotsko popraviti in pas nameščen z upanjem preprečiti ponavljajoče se težave s prilagajanjem in refluks.
V tej majhni podskupini bolnikov, sta želodec in trak v celoti izpostavljeni in novo retrogastric okno se ustvari boljša predhodno pas mesto. Hiatal crura je popolnoma seciramo in formalno posteriorno in anteriorno zaprta več kot 34 francoskega želodčne cevke. Bend se nahaja v novo višjo retrogastric okna in sešiti v mestu z gastrogastric sprednjih šivov.
Kirurška tehnika
Bolnik mora biti nameščena v nizki lithotomy položaj z nogami in rokami odprtih. Kirurg deluje med pacientovih nog, s ustaviti na bolnikovi levi strani (sl. 2). Fig. 2 Kirurška ekipa razpolaganje v laparoskopsko nastavljivim želodca vojaškem sodelovanju. (Moser in Horgan [15])
Prvi trokar uporablja, je 10- do 12-mm trokar A, ki se vstavi z neposrednim prikazom ali z optiview trokar, 15-20 cm od xyphoid procesa z uporabo 10-mm 0 ali 30 ° obseg, ostali Trocars so uvedene pod neposrednim gledanjem. 8-mm trokar (robotska roka) se nahaja tik pod levo prsni koš v srednji clavicular črto; Prav tako je 12-mm trokar dati na levem boku na isti ravni kot kamero. Nato se pacient nahaja v obratnem trendelenburg položajem, ki omogoča boljšo vizualizacijo njegovega kotom. Jetrno Navijalo se vstavi skozi 5 mm rez je postavljen pod xyphoid procesa. Zadnji 8-mm trokar (robotska roka) se nahaja približno 8 cm pod desni prsni koš (sl. 3) [13, 15]. Fig. 3 Prikaz postavitve trokarja za robotsko in laparoskopsko. (Edelson et al., [13]). Nastavljiv želodca umestitev pasu
A robotsko grasper se uporablja, pritrjenih na desno roko in harmoničnega skalpela v levo roko. Prvi korak bi morala biti iztaknili phrenogastric ligament izpostaviti levo crura. Ko je to opravljeno, se gastrohepatic vez odprl izpostaviti kavdalne okrogline jeter, spodnje vena cava in desni crura.
A retrogastric predora se ustvari med robom desnega crura in zadnjo steno želodca dokler se zglobni konica robotsko instrumenta vizualizirajo pod kotom His.
pas nameščen znotraj trebuha preko 12 mm trokar je in konica cevmi se namesti med čeljusti robotsko grasper, vezana z levo roko, in se trak navojem okrog trebuha [15].
konico cevje se vstavi v pasu zaponke in zaklenjena. Potem ko je skupina v mestu, se zaviti izdelano iz želodca, da se zagotovi s pomočjo več ne absorbirajo seromuscular šivanje. Nazadnje je pristanišče nato zavarovani z non-absorbirajo šivanje ali z uporabo vgrajenih kljuke [15].
Povzetek
Zaradi nizke zahtevnosti laparoskopsko želodca so trakovi, uporabnost tega robota v tem postopku, je sporno . Čeprav ni veliko dokumentov pregledovanje robotskih pristop trebušnega pasu, večina serija ponavadi kažejo, da so robotske in običajni pristopi podobnih stopenj zapletov in dolžino pooperativne bivanjem v bolnišnici, vendar se čas delovanja kaže, da je več z Robot zaradi docking.
Verjetno lahko najbolj pomembna prednost robota je mogoče najti pri izvedbi revisional primer zaradi zapletov ali če je treba trebušni pas pretvori v drugo bariatric postopku.
rokav želodca
rokav želodca ( SG) je omejevalen postopek, v katerem je delna levi želodca iz fundusa in telo želodca izvedli, da bi ustvarili dolgo cevasto "rokav" vzdolž manjši ukrivljenosti. Izguba in reševanje drugih bolezni težo pripisujejo ne le omejevalne narave postopka, temveč tudi omejitev s strani pilorus, zmanjšala grelina, povečana sitosti, povečane praznjenja želodca in hitrejši tankega črevesa tranzitni čas s komponento malabsorpcijo [16. in 19].
GS razvijal skozi čas od drugih postopkih. Leta 1988, Doug Hess opravil prvo rokav želodca kot del prehoda dvanajstniku [20]. Anthone v letu 1997, medtem ko opravlja dvanajstniku stikalo v mladem bolniku z žolčevoda kamnov, omejeni postopek le rokav želodca zaradi zapletenosti postopka. V tem konkretnem bolniku, je opaziti odlične rezultate hujšanje zgolj z rokava. Pozneje, med letoma 1997 in 2001, je končal 21 rokav gastrectomies s podobnimi rezultati [21]. Regan [14] opravil prvo laparoskopsko rokav želodca (LSG) pri bolnikih zelo visokim ITM v prvi fazi z naknadno laparoskopski želodčnega obvoda Roux-en-Y (LGBYP).
Nedavno Ameriškega združenja za Metabolic in Bariatric Surgery [22], ki temelji na številnih prospektivnih randomiziranih kontroliranih poskusov in izravnanih trdno povezane študije, priznal SG kot sprejemljivo primarni bariatric postopku in v prvi fazi za želodčni obvod Roux-en-Y (RYGB) ali stikalo dvanajstnika (DS). Poleg tega je bila SG ugotovljeno, da ima profil tveganja /koristi nekje med gospodarstvom laparoskopsko nastavljivim trakom (LAGB) in RYGB [23-25].
Čeprav so zapleti redki, so lahko zelo problematična za zdravljenje. Želodčne pušča sledijo rokav želodca je lahko zelo zahteven in zapleten problem upravljanja. Povprečna poročali Stopnja uhajanja približno 2,7% [26]. Za revisional operaciji, je lahko večja od 10% [27]. Puščanje povzroča krajevne tkiva ishemijo v kombinaciji s povečanim tlakom intraluminalno tulca. Tesna rokav je dejavnik tveganja za puščanje, in je mislil, da je velikost bougie uporablja obratno sorazmerna s stopnjo puščanja [28]. Bolniki z distalno zožitve ali funkcionalne obstrukcije s spiralno osnovno linijo povzročil tudi večje tveganje.
Zožitve ali stenoza je najbolj pogosta na incisura angularis. Pravilno oblikovanje traku s bočni oprijem in ustrezna velikost bougie ko spenjanje na incisura je ključnega pomena pri preprečevanju striktur. možnosti za zdravljenje zožitve lahko endoskopsko dilatacija, seromyotomy ali pretvorba na RYGB.
Čeprav se je stopnja rezanih-line dehiscence je laparoskopskih rokavi gastrectomies nizka, so ti zapleti bali in zelo problematično. Menijo, da bi lahko sedanje omejitve laparoskopsko operacijo (kot so omejen obseg gibanja, slaba ergonomija, pomanjkanje zaznavanja globine, in kirurg utrujenost) dejavniki tveganja za te redkih, toda resnih zapletov. Tako bi lahko izvajanje sistema da Vinci zmanjša pojavnost teh zapletov.
Kot v predhodnem robotsko dobe so robotski rokavi gastrectomies (RSG) so bile tudi prvič izvedli v okviru robotske biliopancreatic preusmeritve z dvanajstnika stikalom (RBPDDS) v letu 2000 [29]. so poročali serija 39 postopkov RSG [30], če jih primerjamo s standardno laparoskopijo (LSG) in daljšem času izreka za 21 minut v robotsko skupini so našli; Ta daljši operativni čas je bil zaradi potrebe po šivanje preko sponke linijo robotsko, ker laparoskopski skupine rezana linija ni bila oversewn.
Drugi avtorji niso opazili razlike v rezultatih v RSG v primerjavi z LSG, razen za daljši operativni časi, ki so bili zaradi priključitve robota. Priklopne ure 16 minut je bila dolga in verjetno odraža učenje učinkovite tehnike priklopne [31].
Druga študija je primerjala LSG primerjavi RSG, ki vključuje več kirurgov, kjer so 277 LSG postopki pregledali pred samo 40 RSG postopkov, je pokazala, da operativni časi je bilo več z RSG na 113 min v primerjavi z 91 min za LSG. Vendar pa je bila stopnja puščanja višje s standardno laparoskopijo, ki prikazuje 1,8% puščanje v LSG roko in 0% v RSG roko. Časovne razlike so bile verjetno posledica razlik v kirurga tehniki in razkrila pomanjkljivosti v naknadni oceni [31]
Več študij tehnike primerjali očitno morali narediti za primarno rokav želodca.; trenutni podatki ne kažejo očitnih kliničnih izidov prednosti.
Uporaba robota v revisional primerih rokav želodca ima pomembno obljubo. Pri bolnikih z rokavi želodca in hude refluks zaradi neustrezno zdravljenih hiatal kile, je bila formalno Hiatal seciranju in posterior crural popravilo opraviti v treh bolnikih s sočasno Naboranost na dilatacionih zgornji del rokava. Ta tehnika je pokazala dobro resolucijo refluks v zgodnjem pooperativnem obdobju. Z razrezom in obnova anatomije je mogoče enostavno doseči v revisional primerih z robotsko pomoč. Robotika je tudi pokazala, da je koristno pri izvedbi rokav želodca po presaditvi jeter [32] in koristna za izvajanje stricturoplasty o strictured rokav [33].
Kirurška tehnika
bolnik se postavi v ležeči položaj s podaljšati roke je robot zasidrana preko glave pacienta, medtem ko se anestezija postavljenih pacientove desni strani, je treba vedno zagotoviti, da ima Anestetičar takojšen in neoviran dostop do glave pacienta (sl. 4). Pomočnik postelji stoji na bolnikovo desni strani in robotski monitor se nahaja nasproti ustaviti na bolnikovi levi. Fig. 4 Robotski rokav želodca ali ustanovi (Rabaza in Gonzalez [49])
Bolnika je treba drapirala brez anestetika pregrade, da bi robot bo zasidrana nad glavo. Pred docking robota, se pacient nahaja v obratnem trendelenburg položaj pri 15 ° -20 °.
Trocar plasiranja
Tri Trocars za robotske roke plus pomočnik trokar so bili dani. Trokarja kamero, ki je 12 mm dolg trokar, ki je nameščen nad popka. Dve robotski delovna veji, ki so lahko 5 ali 8 mm robotski Trocars, postavljenih na sprednjo aksilarno črte na obeh straneh in tik nad raven vrata kamere. A12 mm non-robotski port se nato namesti približno na pol poti med črto od popkovna pristanišča na pravo robotsko pristanišča in nekoliko slabša. Jetra se zloži z Nathanson Hook jetra navijalo, ki se nahaja tik pod xiphoid in je potekal v mestu z navijalom, ki je nameščen na posteljo nad bolnikovo desno ramo. Končno je robot zasidrana neposredno nad bolnikovo glavo.
Pilorus je treba opredeliti kot prvi korak. Približno 4-6 cm proksimalno na pilorus, žilne pritrditev gastrocolic ligamenta je razdeljena z uporabo vira energije, kot je Harmonični skalpel.
Ko je bilo odločeno, območje, kjer se seciranju, se bo za začetek je konzola kirurg dojame želodec s črevesja grasper in nežno dvigne, medtem ko je pomočnik zagotavlja nasprotni oprijem na gastrocolic vezi. Da bi se izognili poškodbe osnovnega debelega črevesa, je pomembno, da ostanejo blizu želodec. Ko je vstopil v manj sac je spretnost levega grasper konzolo kirurga omogoča lažjo orientacijo Harmonični skalpel ob večji ukrivljenosti. Druga možnost je, da se spravite levo grasper pod trebuh in ga dvignili za nadaljnjo izpostavljenost.
Z razrezom še vedno v glavi proti kotu njegovih in kratkih želodca plovil. Ko so kratke želodca plovila nahaja, moramo biti zelo previdni, da bi se izognili moteč krvavitve. Tu je, če visoke ločljivosti, tridimenzionalna pogled robota zagotavlja pomembno prednost. Druga možnost je, da razdeli kratke želodčne plovila po končanem želodca spenjanje del, ki omogoča, da vzorec, ki se navija bočno in plovila, ki jih je treba pristopiti medialno, ki pogosto zagotavlja boljše in varnejše izpostavljenosti deljenje gastrosplenic priloge in kratke želodca plovila .
Ko so kratke želodca posode razdeljen na zgornjem polu vranice so priključki med fundusa in leve CRU treba razdelimo v izogib velik ocesno ozadje na vrhunsko del želodca (neofundus) in jasno identificirati gastroezofagealno spoj in preprečitev spenjanje blizu tega področja.
naslednji korak mora biti dissekcija v območju phrenoesophageal ligamenta pri iskanju okultne hiatal kile. Če se ugotovi kila, je treba popraviti, da bi se izognili GERD kasneje. Z razrezom na tem področju bo tudi pomagalo ugotoviti GE križišča v finalu korakih GS.
Nato distalni odsek gastrocolic ligament se lahko razdeli na približno 4-6 cm proksimalno na pilorus. Ko je to končano, se običajno šibek posterior adhezije želodca z osnovnimi trebušne slinavke razdeljeno da bi v celoti mobilizirati želodec. Mobilizacija ni popolna, dokler manjše ukrivljenosti plovila so opredeljena z zadnjo vidika želodcu. To bo preprečilo večji od nameravano gradnjo rokavov.
Ko plovila razdeljena in želodec, je dobro aktivirati, se začne oblikovanje želodčne rokav. Najprej anesteziolog mora odstraniti vse orogastric sondo ali sondo in opraviti pazljivo 32-36 Fr orogastric tubusov, ki bo uporabljen za umerjanje želodca torbico. posteljne pomočnik kirurg je načrtovano lateralno oprijem v želodcu, medtem ko je konzola kirurg, s pomočjo artikuliranja črevesja grasper, vodi tubusov v proksimalnem dvanajstnika.
Ko kalibracija bougie je na mestu, se začne prečkanje. Pomembno je, da bodite pozorni na kotom spenjalnika in bližine incisura angularis. Zaradi debeline tkiva na tem področju, je treba najprej razstreljevanje treba opraviti z zeleno vložek 60 mm spenjačem (2,0 mm). Konzola kirurg enkrat noter konico bougie medialno proti dvanajsternika z articulating levem grasper in bočno umikom večje ukrivljenosti z desno roko. Pomočnik postelji kirurg nato uvaja spenjalnika. Spenjalnik se postavi po antruma v bolj horizontalni kot vertikalni usmerjenosti. Ta tehnika omogoča "širok zavoj" na področju incisura in odpravljanju na zožitve ali spiralno.
Prečkanje nadaljevati proksimalno vzdolž stranskega roba bougie ob ohranjanju bočni simetrično oprijem. To je pomembno, da se prepreči dajanje v najem s sponkami linijo spiralo ali anteriorno in posteriorno, saj lahko to privede do funkcionalne ovire. Ta korak je močno olajšano s spretnostjo in okretnost na robotskih wristed instrumentov. Ta del prečkanje zaradi debeline tkiva, se lahko izvede z modrim vložkom (3,5 mm).
Zadnji pomemben korak je dokončanje prečkanje pod kotom svojega. Večina bariatrično kirurgi običajno ostanejo od gastroezofagealnem prehodu med zadnjo osnovno žganje, da bi preprečili puščanje na tem področju, ki so lahko katastrofalne. Vendar pa lahko zapusti prevelik ocesno ozadje tudi problem, saj lahko privede do nezadostne izgubi teže ali onesposabljanje gastroezofagealni refluks.
Po končanem rokav, mnogi kirurgi okrepiti s sponkami linijo, da bi zmanjšali pojavnost krvavitev in pušča [ ,,,0],34], lahko ta manever izvesti veliko lažje s pomočjo robota. Če se uporabi imbricating šivanje, potem je treba narediti z bougie v mestu.
Ko je postopek končan, je rezana linija skrbno pregledati, krvavitve in spiralno. Če se ugotovi, spiralno, je prejšnji razdeljen gastrocolic maščobe zašite na osnovno linijo za preprečevanje zavozlal ali nadaljnjo spiralno.
Kot zadnji korak, mora med operacijo endoskopija je treba opraviti, da se zagotovi nepoškodovano sponkami linijo s testom in uhajanje zraka enovito neoviran lumen.
splošno možganov ni nujno potreben pri večini primerov, vendar je treba upoštevati v težkih ali revisional primerih. Resekcija želodca odstranimo s pomočjo pomočnika pristaniškega mesta ali popkovna mestu. Kot vedno, je treba to perifascialno stran zaprta, da se prepreči neposredno pooperativno zaprt pooperacijski kile.
Povzetek
Uporaba robota v bariatrične kirurgije je bila omejena le na tiste kirurgije, ki se štejejo za kompleks, kot so popravki ali obvoznici operacija; obstaja le nekaj dokumentov, ki poročajo z uporabo robota za rokav gastrectomies (tabela 1) .table 1 Pregled literature poročanja uporabo robota za rokav gastrectomies
Diamantis et al. [31]
Ayloo et al. [30]
Abdalla et al. [50]
Elli et al. [32]
Vilallonga et al. [51]
Gonzalez et al. [52]
Leto
2011
2011
2012
2012
2012
2012
Število patients
19
30
5
1
32
134
Leaks
0
0
0
0
0
0
Strictures
0
1 (3,3%)
0
0
0
0
Krvavitev
0
0
1 (20%)
0
0
1 (0,7 %)
Mortality
0
0
0
0
0
0
Conversion
0
0
NP
0
0
0
Surgical Čas
95,5 ± 11,5
135 ± 28
158
77,5 (56-130)
106,6 ± 48,8
Hospital dolžina bivanja
4
NP
NP
4
NP
2,2 ± 0,6
primerjamo tri najpogostejše večjih zapletov po puščanja, krvavitve in striktura (LSG) kot tudi kirurški čas in bolnišnične dolžina bivanja, tako laparoskopski in robotske tehnike so varna in izvedljiva, kaže dobre rezultate na vsak izmerjeni parameter. Vendar kirurški čas ponavadi hitrejši med laparoskopsko pristopom in bolnišnične dolžina bivanja ponavadi krajša z robotsko pristopom.
Kot šibko točko od RSG lahko izpostavimo pomanjkanje robotsko spenjalnika, ki v bistvu dodeljuje delež spenjanje postopka (najbolj kritični odsek postopka), v nočni kirurga. Toda v drugi strani pa okrepljen Gibljivost robota močno omogoča okrepitev sponkami vrstica za šivanje.
želodčni bypass
je želodčni postopek bypass razvili leta 1960 dr Mason [35] in glede na izgubo teže opaziti po zdravljenju razjede v kateri je imel bolniki del želodca odstranjen. Skozi desetletja je bil postopek spremenjen v sedanji obliki z uporabo Roux-en-Y krak črevesa za proizvodnjo želodčnim obvodom Roux-en-Y (RYGBP).
Roux-en-Y povezuje ud od črevesja v manjšem želodčne vrečki, ki preprečuje žolča vstop zgornji del želodca in požiralnika, s čimer se učinkovito mimo preostalega želodec in prvi segment tankega črevesa (sl. 5). Fig. 5 Roux en Y želodčni bypass
Leta 1994 Wittgrove et al. poročali prvi želodčnim obvodom izvaja z laparoskopsko pristop [36]. Od tega poročila je laparoskopski pristop širše sprejeta. Z izkušnjami z uporabo laparoskopsko pristop in dodatne napredka na področju bariatrične kirurgije, sta obolevnost in smrtnost te operacije zmanjšal na sedanjih zelo nizkih ravneh. Vendar pa po drugi strani pa žal laparoskopski pristop uveden tudi pomembne držo napetosti na kirurg zaradi telesa habitus pacienta. Pojav robotsko podprto Roux-en-Y želodčni bypass (RARYGB) izloči pritiske na kirurga in uvedli več dodatnih izboljšav [37]. Minimalno invazivno kirurgi, ki so sprejete robotske digitalnih platform zgodaj razvili izpopolnitev metod in protokolov, ki vodijo do varnih in učinkovitih aplikacij za Roux-en-Y želodca bypass z zelo nizko poročali o obolevnosti in umrljivosti [38].
Študije primerjavo zaplet stopnje robotsko pristopa proti standardnih laparoskopskih tehnik kažejo nižjo stopnjo obolevnosti in umrljivosti za robotske postopkov [39]. Prav tako je krivulja učenja kirurga v prvih 100 robotskih želodčnih obvoznic pregledali in ni anastomozni pušča ali smrtnost je bilo ugotovljeno, [40].
Standardni laparoskopski prebavilih stopnje puščanja so običajno poročajo do 6,3% in umrljivost do 2% [41 42]. Vrsta študij med letoma 2002 in 2008 je predstavil podatke o operativnih časov in zapletov po robotsko podprto Roux-en-Y želodčni bypass [37, 40, 42-45]. Skupno 603 bolnikov prejelo bodisi v celoti robotske (129 bolnikov) ali hibridni robotsko postopek (474 bolnikov). Povprečno operativni čas 201 minut je bila dolga; Vendar pa je bila stopnja uhajanja zelo nizka 0,3% (2 fistule ali pušča). Varnost robotsko operacijo je bila podprta z 0% 30 dni umrljivosti a.
V času, hibridnem postopku, ki je sestavljen iz robotske gastrojejunostomy in laparoskopijo za preostanek primeru je bil bolj priljubljen. Toda od leta 2008, je popolnoma robotsko pristop postali bolj pogosti z boljšimi instrumenti in tehnike, kjer je robot zasidrana na začetku postopka in konzole kirurg opravlja celoten postopek s pomočjo pomočnika nočni napotili vse krtače, ki so potrebne za stvaritev iz želodca vrečke in črevesni obnovo [38].
Čeprav je operativni čas, ponavadi več z robotsko pristopom, so poročali o znižanih operativnih časov, ko je krivulja učenja premagati. Za primer Sanchez et al. pripovedoval randomiziranem preskušanju za RARYGB primerjavi z laparoskopsko RYGB z bistveno krajšimi operativnimi časih za robotsko pristop. RARYGB je 130,8 min v primerjavi s 149,4 min za LRYGB (p = 0,02). Največja razlika je bila pri bolnikih z ITM > 43 kg /m 2, za katerega je bila razlika v času postopka 29.6 min hitreje RARYGB (p = 0,009) [46]
Prednosti robotsko. v primerjavi laparoskopskih ročno prišite gastrojejunostomies so raziskali tudi. Snyder et al. poročali nerandomizirani kohortno študijo o 356 primerih LRYGB proti 249 RARYGB ki neposredno primerjali laparoskopsko handsewn primerjavi robotskih ročno sešiti gastrojejunostomies. Smrtnost je neobstoječa v obeh skupinah, in večje stopnje zaplet je bila podobna v obeh skupinah. Prebavni Stopnja uhajanja je bila bistveno nižja v robotsko skupini (p = 0,04): 1,7% za LRYGB v primerjavi z 0% za RARYGB, to poudarjajo klinično korist od natančnosti robota [47]
Ena od prednosti EU. robotsko pristop lahko izpostavimo prednosti, ki neposredno koristijo kirurg podobnega oprostitvijo boleče ergonomsko položaja in drže, ki vplivajo na vratu, ramen in hrbta. Tudi superior zgornji vizualizacija trebuha omogoča robotsko natančnost in omogoča soočiti z izzivom, ki prihajajo od tistih s predhodnimi trebušnih operacijah.
V morbidnega debelih bolnikih z velikimi debelimi trebušne stene in velika jeter zaradi maščobno infiltracijo, robotika omogoča bolj natančno rekonstrukcija anatomije in učinkovito delajo v majhnih prostorih, kot laparoskopijo.
na drugi strani pa so nekateri avtorji izpostavil pomanjkljivosti v zvezi z robotsko pristopa v zvezi s strmo krivuljo učenja za manipulacijo robota, ki potrebuje med 12 in 15 primerov za normalizacijo . rezultati, podaljšani dok robota, težko mobilizacijo med kvadrantih, in pomanjkanje občutek tipa [40, 45]
Učenje nove tehnologije in znanja je vedno potreben čas; Vendar pa raziskave robotiziranih splošnih kirurgov kažejo krivuljo učenja se nanaša predvsem na namestitev in sidranja sistema in to izboljšuje z usposabljanjem. Performing Roux-en-Y želodčni bypass na konzoli zahteva, da kirurg po enakih načelih in znanja, ki temeljijo na odprtih in laparoskopski operaciji. S tem v mislih, je pomembno, da kirurgi, ki so novi v robotiki najprej pozorni na pravilno izbiro bolnika, najprej izločanju bolnikov z BMIs ≥40, dokler ne dosežemo obvladajo spretnost ravni. Poleg tega naj bi hibridni pristop uporaba na začetku za izvajanje različnih korakov v želodčni obvod do ustreznih spretnosti se razvijajo za opravljanje obvoznico popolnoma robotsko [46-48].
V hibridnega pristopa robot je zasidrano za manjši delež primeru in kot je dodal več izkušenj, je robot v uporabi večji del postopka, dokler ne dosežemo skupno robotsko bypass.
Drug pristop kaže, da mnogi kirurgi so zgodaj najprimernejši za dok samo 3 roke Odprava Creative Commons Public Domain Posvetilo (http: //. creativecommons org /javna last /nič /1. 0 /) se uporablja za podatke, ki so na voljo v tem članku, razen če ni drugače navedeno
.
 Polovica uporabljenih zdravil poškoduje črevesne bakterije,
Polovica uporabljenih zdravil poškoduje črevesne bakterije,
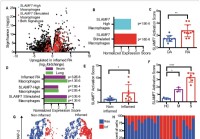 Novi super aktivacijski makrofagni receptor bi lahko razložil hipervnetje pri hudem COVID-19
Novi super aktivacijski makrofagni receptor bi lahko razložil hipervnetje pri hudem COVID-19
 Veganska prehrana bi lahko povečala črevesne mikrobe, ki pomagajo pri izgubi teže
Veganska prehrana bi lahko povečala črevesne mikrobe, ki pomagajo pri izgubi teže
 Antioksidanti v prehrani lahko povečajo tveganje za raka na črevesju,
Antioksidanti v prehrani lahko povečajo tveganje za raka na črevesju,
 Črevesni mikrobi so lahko povezani z depresijo
Črevesni mikrobi so lahko povezani z depresijo
 KVČB je veliko pogostejša od pričakovane,
KVČB je veliko pogostejša od pričakovane,
 Presaditev blata pri določenih darovalcih je boljša od drugih
Presaditev fekalne mikrobiote ali presaditev blata od darovalca je koristna za bolnike, okužene s smrtonosno ponovitvijo Clostridium difficile kar vodi v hudo drisko, bolečine in pogosto resne posle
Presaditev blata pri določenih darovalcih je boljša od drugih
Presaditev fekalne mikrobiote ali presaditev blata od darovalca je koristna za bolnike, okužene s smrtonosno ponovitvijo Clostridium difficile kar vodi v hudo drisko, bolečine in pogosto resne posle
 Mikrobiom bi lahko pomagal pri prepoznavanju tveganja pred rakom pri ženskah s HPV
Nova študija, objavljena v reviji z odprtim dostopom Patogeni PLOS marca 2020 poroča o možni uporabi bakterij Gardnerella najdemo v materničnem vratu in vagini pri ženskah z okužbo s humanim papil
Mikrobiom bi lahko pomagal pri prepoznavanju tveganja pred rakom pri ženskah s HPV
Nova študija, objavljena v reviji z odprtim dostopom Patogeni PLOS marca 2020 poroča o možni uporabi bakterij Gardnerella najdemo v materničnem vratu in vagini pri ženskah z okužbo s humanim papil
 Črevesni mikrobiom je resničnost tudi v življenju ploda
Študija, objavljena v Journal of Clinical Investigation kaže, da pri miših in ljudeh črevesje ploda ima svoj mikrobiom, ki verjetno izvira neposredno iz materinega organizma. Imenovanje tega konca
Črevesni mikrobiom je resničnost tudi v življenju ploda
Študija, objavljena v Journal of Clinical Investigation kaže, da pri miših in ljudeh črevesje ploda ima svoj mikrobiom, ki verjetno izvira neposredno iz materinega organizma. Imenovanje tega konca