gástrico precoce Ultrasonic corta a assistência pode encurtar o tempo de console no gastrectomia robótico para o cancro gástrico precoce da arte abstracta
Fundo
cirurgia gástrica Robotic foi introduzida e está sendo realizada em muitas instalações japonesas. Há algumas limitações de dispositivos capazes de ser usados nos braços robóticos no sistema cirúrgico da Vinci. Revisamos nossos primeiros dez casos de câncer gástrico precoce submetidos a gastrectomia assistida por robô e compararam o tempo operatório entre os casos que foram submetidos a operação apenas com um cautério elétrico e aqueles em quem tesouras coagulantes laparoscópica (LCS) através de uma porta assistente foram usados.
achados
foi utilizado um dispositivo de bisturi elétrico apenas em casos 1-3, e LCS em casos 4-10, exceto caso 9. foi 454 min nos casos em que foram utilizados O tempo cirúrgico médio apenas dispositivos robóticos e 414 min naqueles com LCS auxiliar. O tempo médio de consola 251 min naqueles com LCS auxiliar era significativamente mais curta do que a de 306 minutos nos casos em que foram utilizados apenas os dispositivos robotizados. O número de linfonodos dissecados foi satisfatória, e a perda de sangue estimada era pequeno. complicações pós-operatórias em dois casos foram ligeiros e transitórios com curta permanência no hospital.
Conclusão Use Assistente de tesouras ultra-som é útil para encurtar o tempo de console no gastrectomia robótico.
Palavras-chave
cirurgia robótica câncer gástrico tesouras ultra-som achados
o câncer gástrico é a quinta neoplasia mais prevalente em todo o mundo [1], ea cirurgia é o tratamento curativo mais importante para este malignidade. Vários procedimentos especiais técnicas foram tentadas, e gastrectomia laparoscópica com dissecção de linfonodos demonstrou ser não só viável, mas também seguro, conseguindo resultados pós-operatórios melhor iniciais, quando comparado a gastrectomia aberta convencional [2-4]. A abordagem minimamente invasiva tem ganhado crescente aceitação devido à evolução dos pacientes melhorou. A cirurgia robótica é uma tecnologia emergente que permite que os procedimentos laparoscópicos para ser realizado em muitas situações cirúrgicas, e o sistema cirúrgico da Vinci foi introduzida com resultados encorajadores [5, 6]. gastrectomia robótica é um procedimento viável e segura nas mãos de cirurgiões laparoscópicos experientes [7, 8]. No Japão, houve algumas limitações na disponibilidade de dispositivos no sistema cirúrgico da Vinci. Por exemplo, não podemos usar tesouras ultra-sônicas que é útil para dissecção de linfonodos no Sistema Cirúrgico da Vinci. Neste artigo, analisamos nossa experiência inicial em gastrectomia robótico com o Sistema Cirúrgico da Vinci S.
Métodos Use of Surgical System o da Vinci S na Universidade de Kobe, Kobe, Japão começou em fevereiro de 2011. A inicial de dez pacientes consecutivos com câncer gástrico precoce que foram pré-operatório diagnosticados como cT1N0M0 entre Fevereiro de 2011 e Abril de 2012 e, posteriormente, submetidos à gastrectomia assistida por robô (RAG) foram utilizados nas análises. A decisão de aplicar RAG apenas em pacientes com câncer gástrico precoce baseia-se nas recomendações da conduta terapêutica japonesa para o câncer [9], bem como o fato gástrica que a segurança oncológica da cirurgia minimamente invasiva para o câncer gástrico avançado permanece controverso [3] . As características clínico-patológicas, os resultados pós-operatórias e pós-operatórias morbidades de cada caso são apresentados na Tabela 1. Antes da cirurgia, os detalhes do procedimento foi explicado a todos os pacientes, e apropriadamente foi obtido consentimento informado por escrito. Este estudo clínico foi aprovado pelo Conselho de Administração do Hospital Universitário de Kobe (No. 1110) Institutional Review e registrados no Hospital Medical University Network Informação (Umin) Trials Registry Clínica (umin-CTR) (UMIN000004181, registada setembro 2010 10) .table 1 características clinicopatológicas dos pacientes
Caso #
Idade
Sex
IMC
pT
pN
A perda de sangue (g)
tempo operatório (min)
Console de tempo (min)
pós-operatório. hosp. ficar
Robotic única ou LCS ajudá
1 | 61
M
23,5
pT1a
pN0
60
426
275
11
Robotic única Página 2
71
M
21,3
pT1b
pN0
30
408
304
11
Robotic única Sims 3
57
F
26,0
pT2
pN0
60
462
290
10
Robotic única 4
70
M
23,5
pT1a
pN0
94
386
225
12
LCS ajudá
5
44
F
18,0
pT1b
pN0
0
347
204
16
LCS ajudá
6
59
F
21,9
pT1b
65
404
250
11
LCS pN0
ajudar
7
50
F
21,3
pT1a
pN0
90
441
243
12
LCS ajudá
8
68
M
26,8
pT1b
pN0
155
461
273
11
LCS ajudá
9
74
M
21,4
pT1b
pN0
90
518
355
10
Robotic única
10
64
M
24,6
pT1a
pN0
45
444
308
12
LCS ajudá
Todas as operações no presente estudo foram realizadas pelo mesmo cirurgião (DK) e os mesmos assistentes (TN e ss). Sistema Cirúrgico Da Vinci S foi utilizado em todos os procedimentos, exceto anastomose gastro-duodenais ou gastro-jejunal. Todos os pacientes foram submetidos a gasrectomy distal com D1 + D2 ou linfadenectomia. A Figura 1 mostra as localizações dos trocartes. Usamos um trocarte de 12 mm para a câmera, três trocartes de 8 mm para os braços do robô, e um trocarte de 12 mm para o assistente cirúrgico. Quase todos os procedimentos cirúrgicos na cavidade abdominal são idênticos aos de uma gastrectomia laparoscópica. Tal como tesouras de ultra-sons não pode ser utilizada no Japão, foi utilizado tesoura curva monopolares no primeiro braço, Maryland pinças bipolares no segundo braço, e uma pinça Cadiere no terceiro braço do robô. O assistente retrai o estômago ou pâncreas, opera o grampeador, e aplica clips. Para encurtar o tempo de console, o assistente usado tesouras ultra-sônicas (tesouras coagulantes laparoscópica; LCS) para dissecar os gânglios linfáticos e omento perigastric ao longo da curvatura menor em casos 4-10, exceto caso 9. O estômago foi extraído através de um 4 centímetros incisão na abdômen superior, e gastrectomia distal foi feito. Reconstrução pelo método Billroth-I foi realizada através desta incisão usando um grampeador circular 29 mm. FIG. 1 Localização dos portos em gastrectomia robótico. C
porta da câmera. A
ajudar porto. ①: port braço 1º robô. ②: port braço segundo robô. ③: 3ª porta braço robótico
análise estatística foi realizada pelo teste t de Student não pareado. valores < P 0,05 foram considerados estatisticamente significativos
Resultados A Tabela 1 mostra as características clínico-patológicas e resultados operatórias dos pacientes.. Embora o estadiamento clínico pré-operatório de todos os pacientes foi inferior cT1N0M0, um paciente (caso 3) tinham uma lesão pT2. O número de linfonodos dissecados foi satisfatório para avaliar metástases patológica patologicamente. O tempo cirúrgico médio foi de 454 minutos nos casos em que foram utilizados apenas os dispositivos robóticos, e 414 min naqueles com LCS ajudar. Embora o tempo operatório foi menor com LCS ajudar, não houve diferença estatisticamente significativa. No entanto, o tempo médio de consola 251 min naqueles com LCS auxiliar era significativamente mais curta do que a de 306 minutos nos casos em que foram utilizados apenas os dispositivos robotizados (Fig. 2). A diferença entre estes tempo meio do console era -55,5 min, 95% intervalo de confiança -108,9 para -2,1 min; p = 0,0435. A perda de sangue estimada era pequeno. complicações pós-operatórias incluíram atrasou o esvaziamento gástrico em caso 5 e disfunção hepática em caso 6, ambos foram ligeira e transitória com hospitalizações curtas. FIG. 2 Tempo de operação de cada caso. O tempo de consola média de 251 min naqueles com LCS auxiliar foi significativamente menor do que o de 306 minutos nos casos em que apenas os dispositivos robóticos foram usadas
Discussão
cirurgia laparoscópica assistida por robô fornece uma visão 3-dimensional e articulado movimento sem tremor fisiológico. Em geral, a cirurgia robótica é relatado para exigir um tempo de funcionamento mais longo do que a cirurgia convencional laparoscópica ou aberta. O tempo de funcionamento prolongado é causado pelo tempo adicional set-up para os braços robóticos, no entanto, este período de tempo de preparação poderia ser encurtado [7]. Outra razão para o tempo de atraso pode ser a restrição em dispositivos que podem ser utilizados no Japão. tesouras ultra-som é um dispositivo útil para dissecar o tecido incluindo os navios. Ele pode de forma segura ocluir não só artérias, mas também veias e vasos linfáticos. Nós usamos tesouras ultra-sônicas principalmente em dois procedimentos cirúrgicos realizados pelo assistente através da porta auxiliar. O omento maior foi dividido e dissecado usando as tesouras ultra-sônicas em direção ao pólo inferior do baço. Após o recorte das raízes dos vasos gastroepiplóicos esquerda, a divisão do omento foi continuada para baixo até ao piloro. Esta divisão do omento precisa de manipulação menos sofisticados e é mais rápido. Outro procedimento é a dissecção de linfonodos perigastric ao redor da curvatura menor até a junção esofagogástrica. Às vezes é difícil de conseguir hemostasia por dispositivos monopolar ou bipolar. A aplicação de clipes leva tempo, porque os grampos têm de ser carregado, um por um. As tesouras de ultra-sons são eficazes na vedação das embarcações neste campo. Assim, o suporte assistente usando tesouras de ultra-sons foi significativamente eficaz na redução do tempo de consola (Fig. 2). No caso 9, todos os procedimentos de dissecação foram realizadas por robótica única sem assistência tesouras de ultra-sons, no entanto, o tempo de consola, neste caso, era 355 min. Embora esperamos que o efeito de aprendizagem para encurtar o tempo de console, este julgamento não foi bem sucedida. Claro, ainda há uma limitação da análise estatística devido ao pequeno número de casos, uma análise mais aprofundada com mais casos será recomendada.
Noshiro et al. [10] relatou que robô-assistida gastrectomia distal utilizando instrumentos bisturi elétrico sem dispositivos ultra-activado era viável e segura no que diz respeito à perda de sangue, a dissecção de linfonodos e complicações. Se uma variedade de dispositivos estavam disponíveis para selecção, isso aumentaria as possibilidades para a realização de uma operação sofisticada. Instrumentos energia
ultra-som ou um aferidor de navio seria útil para a realização de procedimentos cirúrgicos eficazes em menos tempo. No presente momento, assistente de uso de tesouras ultra-som é útil em gastrectomia robótico
Notas
Yoshihiro Kakeji e Daisuke Kuroda contribuíram igualmente para este trabalho
abreviações
RAG:.
Robô gastrectomia assistida (RAG)
LCS:
tesouras de coagulação laparoscópicas
declarações
contribuições dos autores
YK e DK contribuíram igualmente para Este trabalho. DK, TN, e SS realizou a cirurgia. TN e SS analisados os dados. MY, SK, TI, e KT discutiu a análise. YK e DK desenhou o estudo e escreveu o manuscrito. Todos os autores leram e aprovaram o manuscrito final.
Agradecimentos
Agradecemos Takashi Omori de Center for Clinical Research Promotion, Hospital Universidade de Kobe, Kobe, no Japão, que revisou métodos estatísticos. Este estudo foi realizado sem fontes de financiamento.
Cumprimento das diretrizes éticas
Conflito de interesses Os autores declaram que não têm interesses conflitantes.
Divulgação financeira Todos os autores indicaram que não têm relações financeiras relevantes para este artigo para . divulgação
artigo Abrir AccessThis é distribuído sob os termos da Licença Internacional 4.0 Creative Commons Attribution (http: //. creativecommons org /licenses /by /4. 0 /), o que permite irrestrita uso, distribuição e reprodução em qualquer meio, desde que você dê crédito apropriado ao autor original (s) e da fonte, fornecer um link para a licença Creative Commons, e indicar se as alterações foram feitas. A renúncia Creative Commons Public Domain Dedication (http:. //Creativecommons org /publicdomain /zero /1. 0 /) aplica-se aos dados disponibilizados neste artigo, salvo indicação em contrário
.
 Exame de sangue para DNA microbiano pode alertar sobre câncer
Exame de sangue para DNA microbiano pode alertar sobre câncer
 Poucas evidências de trombocitopenia associada à vacina de mRNA COVID-19,
Poucas evidências de trombocitopenia associada à vacina de mRNA COVID-19,
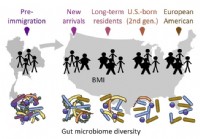 A migração afeta a microbiota intestinal, que por sua vez afeta a saúde dos pesquisadores.
A migração afeta a microbiota intestinal, que por sua vez afeta a saúde dos pesquisadores.
 Novo ensaio mostra sobrevida melhorada para pacientes com câncer colorretal avançado mutante BRAF
Novo ensaio mostra sobrevida melhorada para pacientes com câncer colorretal avançado mutante BRAF
 Certas espécies bacterianas podem aumentar o risco de HIV em mulheres,
Certas espécies bacterianas podem aumentar o risco de HIV em mulheres,
 Como fatores do hospedeiro, como o microbioma pulmonar, auxiliam na infecção por SARS ‐ CoV ‐ 2?
Como fatores do hospedeiro, como o microbioma pulmonar, auxiliam na infecção por SARS ‐ CoV ‐ 2?
 Perda da barreira epitelial intestinal responsável por MIS-C relacionado a COVID-19 em crianças,
sugere estudo Embora a doença coronavírus 2019 (COVID-19) em crianças seja relativamente rara e geralmente leve, alguns são conhecidos por retornar com um raro, mas sério, ou mesmo com risco de vida,
Perda da barreira epitelial intestinal responsável por MIS-C relacionado a COVID-19 em crianças,
sugere estudo Embora a doença coronavírus 2019 (COVID-19) em crianças seja relativamente rara e geralmente leve, alguns são conhecidos por retornar com um raro, mas sério, ou mesmo com risco de vida,
 Estudo geneticamente modificado de bactérias intestinais reduz o risco de câncer colorretal em ratos
Os pesquisadores descobriram que a edição dos genes das bactérias presentes no intestino dos ratos pode ajudar a reduzir a inflamação e o risco associado de câncer colorretal. A pesquisa dos cientista
Estudo geneticamente modificado de bactérias intestinais reduz o risco de câncer colorretal em ratos
Os pesquisadores descobriram que a edição dos genes das bactérias presentes no intestino dos ratos pode ajudar a reduzir a inflamação e o risco associado de câncer colorretal. A pesquisa dos cientista